
随着科技的快速发展,人类正在被先进的机器所替代,就像最近网站上发布的视频那样,视频中,十只spotmini依次排列,整齐划一的步伐开始了“狗生”的纤夫生活。看着他们一步一步拉动卡车前进,令人十分惊叹!那么波士顿动力公司到底是一家什么样的公司呢?该公司主要做哪些产品呢?带着这些疑问,让我们一起来了解下这家公司吧。

波士顿动力公司(英语:Boston Dynamics)是一家美国的工程与机器人设计公司,此公司的著名产品包含在国防高等研究计划署(DARPA)出资下替美国军方开发的四足机器人:波士顿机械狗,以及DI-Guy,一套用于写实人类模拟的现成软件(COTS)。此公司早期曾和美国系统公司一同接受来自美国海军航空作战中心训练处(NAWCTSD)的一份合约,该合约的内容是要以DI-Guy人物的互动式3D电脑模拟,取代海军飞机弹射任务训练影片。
该公司由Marc Raibert和其合伙人一起创办。Marc Raibert是著名的机器人学家。其28岁毕业于MIT,随后在CMU担任过副教授,并且在那里建立了CMUleg实验室研究与机器人有关的控制和视觉处理相关的技术。在37岁时回到MIT的继续从事机器人相关的科研和教学工作。在1992年,其与合伙人一起创办了Boston Dynamics这家公司,开启了机器人研究的新纪元。
在2013年12月13日,波士顿动力公司被Google收购。2017年6月9日软银以不公开的条款收购谷歌母公司Alphabet旗下的波士顿动力公司。我们一起来回顾一下波士顿动力的机器人项目吧。
据笔者所知,波士顿动力旗下有不少产品线,包括 4 足的 Spot、SpotMini机器人、Atlas 双足机器人、在仓库搬货的 Handle 两轮机器人,其他还有 4 轮机器人 SandFlea、机器手臂 Pick 等。以下是几款机器人的例子。

波士顿机械狗(Boston Dynamics BigDog)是一种动力平衡四足机器人,由波士顿动力公司、福斯特-米勒公司、喷气推进实验室,以及哈福大学康德菲尔德研究站共同于2005年研发。
该项目是由美国国防高等研究计划署出资资助。希望研制一种能够负重的机械骡,能够和士兵一起在传统机械车辆无法行驶的粗糙地形上作战。
它没有车轮或者履带,而是采用四条机械腿来运动。机械腿上面有各种传感器,包括关节位置和接触地面的部位。它还有一个激光回转仪,以及一套立体视觉系统。
机械狗有一米长,0.7米高,75千克重,几乎相当于一头小骡子的体积。目前能够以每小时5.3公里的速度穿越粗糙地形,并且负载154千克的重量。它能够爬行35度的斜坡。
其运动是由装载在机身上的计算机控制的。这台计算机能够接收机器上各种传感器传达的信号。导航和平衡也由这个控制系统控制。
2008年3月18日,波士顿动力公司释放了一段关于新一代的机械狗的录像,在这个录像当中,机械狗能够穿越结冰地面,并且能够在被侧踹之后恢复平衡。

Atlas机器人(英语:Atlas(robot))是一个双足人形机器人,由美国波士顿动力公司为主开发,和由美国国防部国防高等研究计划署(DARPA)的资助和监督。这个身高6-英尺(1.8-米) 的机器人是专为各种搜索及拯救任务而设计,并在2013年7月11日向公众亮相。

新版本Atlas机器人
2016年2月23日,波士顿动力公司在YouTube上发布了一个新版本Atlas机器人的视频。 新版本的Atlas设计用于在户外和建筑物内部操作。 它专门用于移动操纵,非常擅长在广泛的地形上行走,包括雪地。 它是电动和液压驱动。它使用身体和腿部的传感器进行平衡,并在其头部使用光学雷达和立体传感器,以避免障碍物,评估地形,帮助导航和操纵对象,即使对象被移动。 这个版本的Atlas机器人是大约175cm(5英尺9英寸)高(大约比DRC Atlas矮一个头),重量为180磅(82千克)。
经过一年年的技术迭代,波士顿动力的四足机器人不在仅仅是应对军方的大狗机器人,而越来越变得小巧灵活,适应力极强。
为了探索其背后的技术路线,我们对波士顿动力申请的专利进行了检索分析:
波士顿专利布局情况
对小波的主要申请人BostonDynamics进行检索,检索截止日期为2019年1月,其中涉及机器人的专利文献共有72篇,对其进行简单统计,可以得到如下结果:
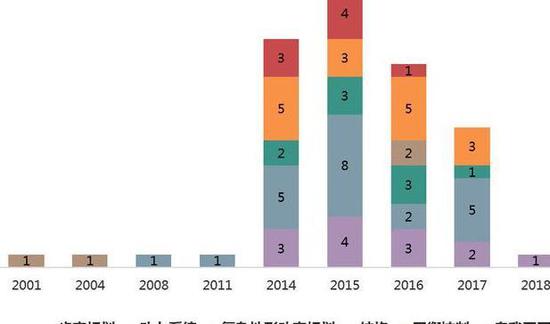
可以看出:从2001~2011年,波士顿共申请了4件有关足式机器人的专利,这十年是足式机器人技术的探索阶段,即专利布局的早期阶段;从2014年开始,波士顿动力在足式机器人的不同技术维度开始进行专利布局,直至2017年都保持了较高的申请量,这期间不断推出了足式机器人的改进版,于2016-2017年推出的SpotMini是更新换代的产品(爬楼梯的SpotMini),为其商业化应用奠定了基础。
如下图所示,通过对上述72篇专利进行分类标引,波士顿动力四足机器人的技术领域主要涉及液压驱动和电液混合驱动,上述技术保证了机器人具有较强的运动能力,而步态规划、平衡控制、复杂地形动态规划以及自我回正属于机器人的运动控制,同时也是波士顿的核心技术,上述技术使机器人更好的适应环境,维持动态平衡,实现智能移动。

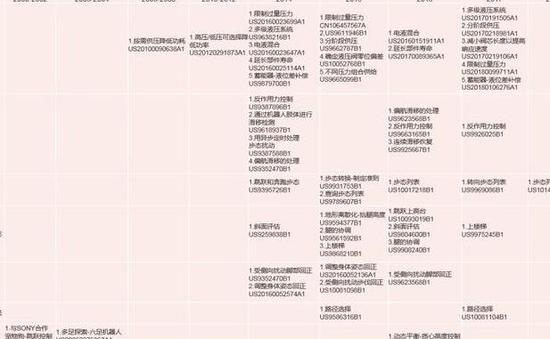
下图为波士顿动力足式机器人专利技术路线图。
1、波士顿动力早期专利
通过分析波士顿动力的专利申请趋势可发现,波士顿动力虽然成立于1992年,然而早期的专利申请多是关于离合器、轴承、医疗器械等,直至2001年9月21日才与SONY公司联合申请一种仿生宠物狗机器人专利(US6484068B1),该专利主要解决的是宠物狗机器人的跳跃控制。
专利中将跳跃划分为两个控制阶段,第一阶段控制机器人的四个脚同时跳离地面,第二阶段控制前腿先落地后腿后落地,通过改变腿的落地角度和延迟角度实现落地。
而在2004年6月9日波士顿动力独立申请了一份可以行走或爬行的多足机器人的专利US20050275367A1,设置在机身上的12个电机通过锥齿轮机构驱动六个腿的运动,如下图所示。通过这种锥齿轮机构还可实现机器人身体高度的调整。
经过了前期在多足机器人领域的探索,波士顿动力在多足机器人的发展上持续改进,并将其成果进行专利布局。
2、四足机器人动力系统分析
动力问题是机器人的核心问题,关系着机器人能否动起来,工作时间的长短。波士顿动力早期的机器人主要是电机通过齿轮驱动连杆机构,对于没有载荷要求的机器人而言是足够的,对如Bigdog这类以内燃机为动力且需搭载较大负荷的机器人则显得力不从心,为此,波士顿动力在液压驱动方面布局了较多专利,如下图的液压控制技术发展路线。
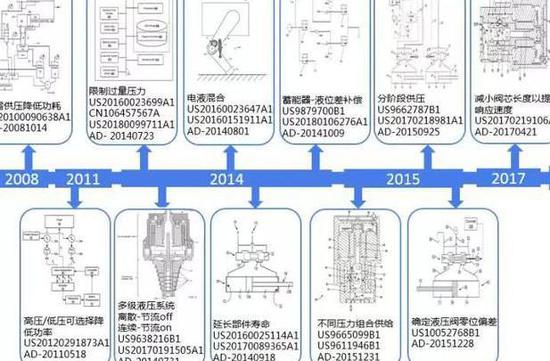
BigDog系统能耗高的问题突出,能量的多次转换、多环节传递造成了大能量损失,如下图所示为足式机器人在前行中理想的足部轨迹,腿部的运动是通过液压系统实现,在理想轨迹下机器人可降低液压驱动能耗。
足式机器人在不同场合需要不同的功率供给,具有不同功率模式切换是降低功耗的重要手段,为此,波士顿动力在2008年10月14日提交的专利US20100090638A1中通过传感器检测力,控制器控制阀适时进行开关动作,实现按需高功率或者低功率模式。在此基础上,波士顿动力在2011年5月18日提交的专利申请US20120291873A1中公开了一种具有高压油路,中压油路和低压返回油路的液压系统。
为了提高机器人运行的效率、减小功率消耗以及提高运动的稳健性,波士顿动力在2014年8月1日提交的专利US20160023647A1中通过判断关节承受的载荷类型和大小,以选择适当的液压或电动致动器,使得机器人的功率消耗最低。如下图所示,机器人根据不同的负载选择不同的驱动方式组合。
比外,波士顿动力还在提高液压系统的稳定供压、通过不同压力组合、分阶段供压、提高液压部件损坏工作寿命、提高阀的响应速度等方面均进行了专利布局。以上这些专利中的技术均用于保证液压系统高效和可靠工作。
3、四足机器人步态分析
在解决了动力方面的问题后,还需解决机器人如何动的问题。四足机器人在行进时不同的时间段需要不同的行进速度,而不同的行进速度对应不同的步态,四足机器人的步态包括Walk(慢走)、Trot(小跑)、Bounding(跳跃)、Gallop(飞奔)。
通过检索,波士顿动力在步态转换方面先后申请了6件专利,其技术发展主要涉及如何实现不同步态、制定步态转换准则、制定步态列表等。
波士顿动力在2014年12月17日申请且已授权的专利US9395726B1中公开了机器人通过控制俯仰角、高度、速度以及其产生的力实现不同的步态。
本月的7号,波士顿动力进行了一笔收购交易,这也是该公司历史上的第一笔收购交易。它收购了总部位于加州门洛帕克(Menlo Park)的 Systems,该公司利用视觉传感器和深度学习软件帮助机器人操纵箱子。此次收购没有披露财务细节。目前该公司已将其技术运用在Handle机器人上,波士顿动力未来也会希望销售这个产品。
仿生机器人的难点就在于运动稳定性的控制,但是这个难点在波士顿这里反倒成了他们最为突出的优势,反观国内,在这个领域与波士顿动力的差距可不是一星半点。要赶上波士顿动力的步伐,还需要走很长的路。也期待国内的科研工作者们为我们带来更为创新的技术!
